基于實(shí)車(chē)在環(huán)VIL的駕駛輔助系統(tǒng)測(cè)試技術(shù)及應(yīng)用
隨著汽車(chē)智能化、網(wǎng)聯(lián)化浪潮的推進(jìn),高級(jí)駕駛輔助系統(tǒng)(ADAS)和自動(dòng)駕駛系統(tǒng)的功能日益復(fù)雜,對(duì)其安全性、可靠性的驗(yàn)證提出了前所未有的挑戰(zhàn)。傳統(tǒng)的實(shí)車(chē)道路測(cè)試成本高昂、周期漫長(zhǎng)、場(chǎng)景覆蓋有限且存在安全風(fēng)險(xiǎn),而純虛擬仿真測(cè)試則難以完全模擬真實(shí)世界的物理交互與傳感器特性。在此背景下,實(shí)車(chē)在環(huán)(Vehicle-in-the-Loop, VIL)測(cè)試技術(shù)應(yīng)運(yùn)而生,它通過(guò)將真實(shí)車(chē)輛與虛擬仿真環(huán)境深度融合,構(gòu)建了一個(gè)高效、安全、可復(fù)現(xiàn)的測(cè)試驗(yàn)證平臺(tái),正成為驅(qū)動(dòng)駕駛輔助系統(tǒng)開(kāi)發(fā)與驗(yàn)證的關(guān)鍵技術(shù)。
一、VIL測(cè)試技術(shù)的核心原理與系統(tǒng)構(gòu)成
實(shí)車(chē)在環(huán)測(cè)試的核心思想是“虛實(shí)結(jié)合”。它將真實(shí)的被測(cè)車(chē)輛置于受控的實(shí)驗(yàn)室環(huán)境(如轉(zhuǎn)鼓試驗(yàn)臺(tái)或封閉場(chǎng)地)中,車(chē)輛的真實(shí)執(zhí)行器(轉(zhuǎn)向、制動(dòng)、油門(mén))和傳感器(攝像頭、雷達(dá)等)保持工作狀態(tài)。通過(guò)高精度車(chē)輛動(dòng)力學(xué)模型、高保真的虛擬交通場(chǎng)景以及傳感器物理仿真模型,實(shí)時(shí)生成與車(chē)輛動(dòng)作相匹配的虛擬環(huán)境信息,并注入(Inject)到車(chē)輛的傳感器或控制器中。這樣,車(chē)輛“感知”到的是一個(gè)由計(jì)算機(jī)生成的、可精確控制的虛擬世界,并據(jù)此做出真實(shí)的決策與控制響應(yīng),其響應(yīng)又反饋回仿真系統(tǒng),形成閉環(huán)。
一個(gè)完整的VIL測(cè)試系統(tǒng)通常由以下幾個(gè)關(guān)鍵部分構(gòu)成:
- 真實(shí)車(chē)輛平臺(tái):包含完整的線控底盤(pán)、傳感器套件及待測(cè)的ADAS/自動(dòng)駕駛域控制器。
- 車(chē)輛操控平臺(tái):多為底盤(pán)測(cè)功機(jī)(轉(zhuǎn)鼓試驗(yàn)臺(tái)),用于承載真實(shí)車(chē)輛,模擬車(chē)輛與路面的縱向動(dòng)力學(xué)交互,并允許車(chē)輛真實(shí)驅(qū)動(dòng)輪旋轉(zhuǎn)。
- 實(shí)時(shí)仿真與管理系統(tǒng):這是系統(tǒng)的“大腦”,運(yùn)行高精度的車(chē)輛動(dòng)力學(xué)模型、交通場(chǎng)景模型、道路環(huán)境模型以及傳感器物理模型。它需要具備強(qiáng)大的實(shí)時(shí)計(jì)算能力,確保仿真步長(zhǎng)足夠小,以跟上真實(shí)車(chē)輛的控制節(jié)奏。
- 傳感器模擬與注入系統(tǒng):這是“虛實(shí)結(jié)合”的橋梁。對(duì)于攝像頭,可能采用屏幕投影或直接視頻流注入;對(duì)于雷達(dá),采用射頻信號(hào)仿真與注入設(shè)備;對(duì)于激光雷達(dá),采用回波信號(hào)模擬。該系統(tǒng)將仿真環(huán)境中的目標(biāo)信息,轉(zhuǎn)化為真實(shí)傳感器可接收的物理信號(hào),輸入給車(chē)輛。
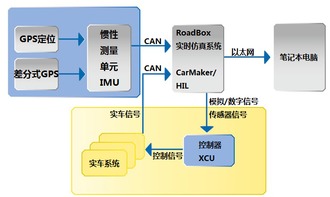
- 數(shù)據(jù)采集與同步系統(tǒng):用于同步記錄來(lái)自真實(shí)車(chē)輛總線(CAN、以太網(wǎng)等)的數(shù)據(jù)和仿真系統(tǒng)的數(shù)據(jù),為后續(xù)分析提供依據(jù)。
二、核心測(cè)試技術(shù)優(yōu)勢(shì)
相較于純實(shí)車(chē)測(cè)試和純仿真測(cè)試,VIL測(cè)試技術(shù)展現(xiàn)出獨(dú)特的優(yōu)勢(shì):
- 安全性與可重復(fù)性:危險(xiǎn)場(chǎng)景(如高速追尾、行人橫穿)可在虛擬環(huán)境中無(wú)限次、安全地復(fù)現(xiàn),消除了實(shí)車(chē)測(cè)試的人員與財(cái)產(chǎn)風(fēng)險(xiǎn)。測(cè)試條件可精確復(fù)現(xiàn),便于問(wèn)題排查與回歸測(cè)試。
- 場(chǎng)景覆蓋與擴(kuò)展性:可輕松構(gòu)建海量、極端、罕見(jiàn)的長(zhǎng)尾場(chǎng)景,包括各種天氣、光照、交通參與者行為組合,極大擴(kuò)展了測(cè)試的覆蓋范圍與效率。
- 成本與效率:大幅減少了實(shí)車(chē)路測(cè)的里程需求、人力物力消耗以及時(shí)間成本,使得在開(kāi)發(fā)早期進(jìn)行密集迭代測(cè)試成為可能。
- 深度可控與可觀測(cè)性:測(cè)試人員可以完全控制虛擬環(huán)境中的每一個(gè)變量,并可以無(wú)干擾地觀測(cè)車(chē)輛內(nèi)部所有控制信號(hào)與狀態(tài),這是實(shí)車(chē)測(cè)試難以做到的。
三、在計(jì)算機(jī)軟硬件及輔助設(shè)備領(lǐng)域的應(yīng)用與挑戰(zhàn)
VIL測(cè)試的落地與效能提升,高度依賴于先進(jìn)的計(jì)算機(jī)軟硬件及專用輔助設(shè)備。
在硬件方面:
1. 高性能實(shí)時(shí)計(jì)算平臺(tái):需要多核高性能CPU、GPU以及實(shí)時(shí)操作系統(tǒng),以并行運(yùn)行復(fù)雜的物理模型、渲染高畫(huà)質(zhì)場(chǎng)景并保證確定的低延遲。
2. 高精度車(chē)輛操控與測(cè)量設(shè)備:高動(dòng)態(tài)響應(yīng)的底盤(pán)測(cè)功機(jī)、高精度慣導(dǎo)測(cè)量單元(IMU)、輪速與扭矩測(cè)量傳感器等,是準(zhǔn)確模擬車(chē)輛動(dòng)力學(xué)和獲取車(chē)輛真實(shí)狀態(tài)的基礎(chǔ)。
3. 高保真?zhèn)鞲衅鞣抡嬖O(shè)備:這是技術(shù)難點(diǎn)與關(guān)鍵。例如,毫米波雷達(dá)目標(biāo)模擬器需要能在射頻前端模擬多個(gè)動(dòng)態(tài)目標(biāo)的距離、速度、角度信息;攝像頭注入系統(tǒng)需要解決延遲、圖像逼真度與光學(xué)標(biāo)定等問(wèn)題。這些專用設(shè)備構(gòu)成了VIL系統(tǒng)的核心價(jià)值與壁壘。
在軟件方面:
1. 高精度多物理場(chǎng)耦合仿真模型:包括輪胎-路面模型、車(chē)輛多體動(dòng)力學(xué)模型、傳感器物理特性模型(如雷達(dá)波束模式、攝像頭光學(xué)畸變與噪聲)等,其精度直接決定測(cè)試結(jié)果的可信度。
2. 場(chǎng)景生成與管理軟件:支持OpenSCENARIO、OpenDRIVE等標(biāo)準(zhǔn)格式,能夠編輯、隨機(jī)生成、批量管理和回放復(fù)雜的測(cè)試場(chǎng)景。
3. 集成開(kāi)發(fā)與自動(dòng)化測(cè)試框架:提供友好的用戶界面,將硬件在環(huán)、VIL、云仿真等不同測(cè)試手段集成到統(tǒng)一的工具鏈中,支持測(cè)試用例的自動(dòng)化執(zhí)行、結(jié)果自動(dòng)評(píng)估與報(bào)告生成。
面臨的挑戰(zhàn)主要包括:傳感器物理仿真(特別是激光雷達(dá)和復(fù)雜環(huán)境下的攝像頭)的逼真度仍有待提升;多傳感器時(shí)空同步與低延遲注入技術(shù)難度高;整個(gè)VIL系統(tǒng)的集成復(fù)雜度高,標(biāo)定與維護(hù)工作量大;測(cè)試用例的有效性評(píng)估與通過(guò)標(biāo)準(zhǔn)仍需行業(yè)共識(shí)。
四、
基于實(shí)車(chē)在環(huán)(VIL)的測(cè)試技術(shù),憑借其虛實(shí)融合的獨(dú)特優(yōu)勢(shì),已成為驗(yàn)證智能駕駛系統(tǒng)功能安全與預(yù)期功能安全不可或缺的一環(huán)。它的發(fā)展緊密依賴于計(jì)算機(jī)仿真軟件、實(shí)時(shí)計(jì)算硬件以及高精專用測(cè)試設(shè)備的協(xié)同進(jìn)步。隨著相關(guān)軟硬件技術(shù)的不斷成熟與標(biāo)準(zhǔn)化,VIL測(cè)試將在提升自動(dòng)駕駛系統(tǒng)研發(fā)效率、加速其安全可靠落地方面,發(fā)揮越來(lái)越核心的作用,是連接虛擬仿真與最終實(shí)車(chē)認(rèn)證之間的關(guān)鍵橋梁。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://m.benlve.cn/product/75.html
更新時(shí)間:2026-03-01 16:31:27